Path Integral Control for Hybrid Systems
Controlling Complex Robots
Controlling robots that interact with their environment is difficult because their movements have sudden changes and are affected by noise.
My research introduces the Hybrid Path Integral (H-PI) framework to solve this problem for complex, nonlinear systems. H-PI finds the best control method by analyzing all possible paths a robot could take.
To make this process more efficient, I used a technique called importance sampling with a specific proposal distribution. This approach significantly improved the accuracy of the control system. Our experiments on various robotic systems proved that both methods are effective and reliable.
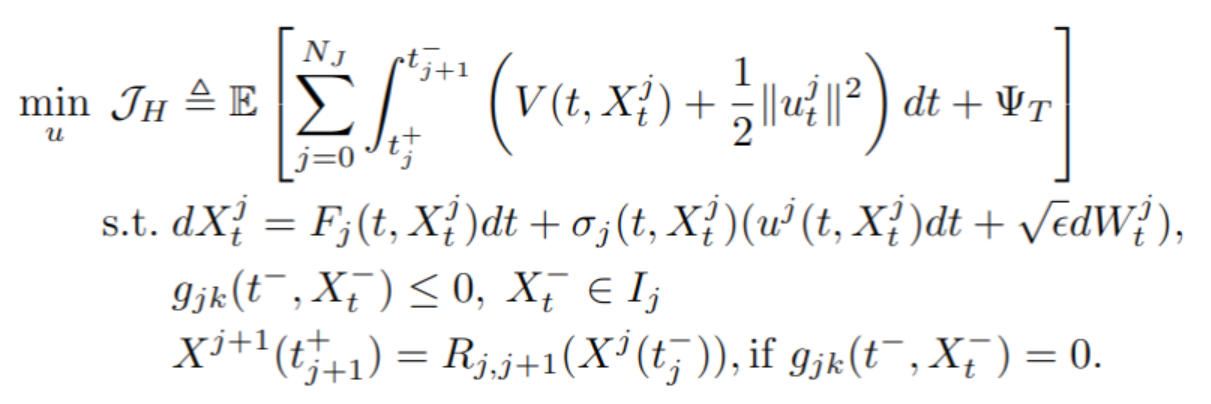
Formulation
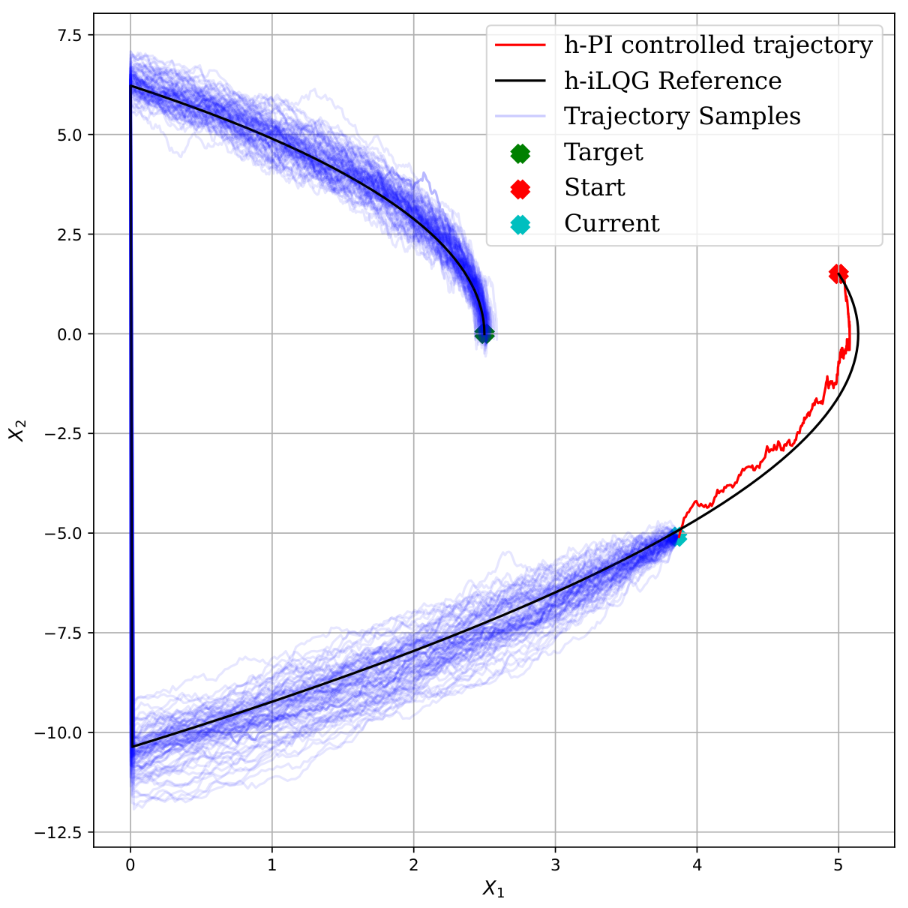
Results