Path Integral Control for Partially Observed Systems
Optimal Control under Partial Observability
This research addresses the challenge of controlling nonlinear stochastic systems where the state is not directly accessible and must be inferred from noisy measurements—formally known as the continuous-space Partially Observable Markov Decision Process (POMDP).
We propose a novel framework that generalizes the Fully Observable Value Approximation method from discrete domains to continuous-time environments. By integrating this approximation with Path Integral Control, we derive a sampling-based control strategy that is computationally efficient and applicable to complex nonlinear dynamics.
The resulting controller exhibits a structure analogous to classical linear controllers but retains the capability to handle significant nonlinearities and measurement noise.
Mathematical Formulation
Optimal Control Objective: We seek to minimize a cost function subject to stochastic dynamics. 
System Dynamics & Measurement Model: The system evolves according to stochastic differential equations with partial observations. 
Methodology
Our approach approximates the value function to decouple the estimation and control problems effectively. 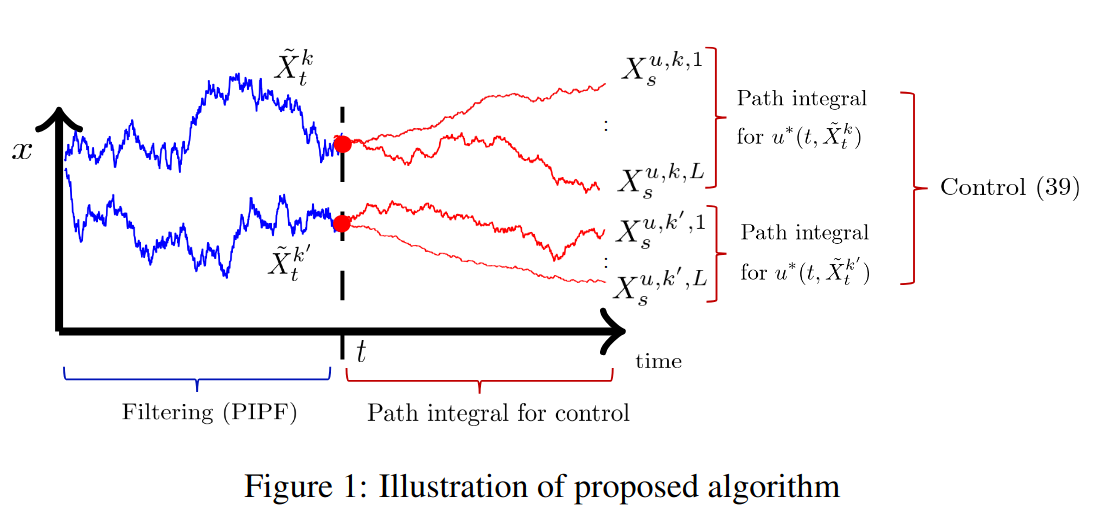
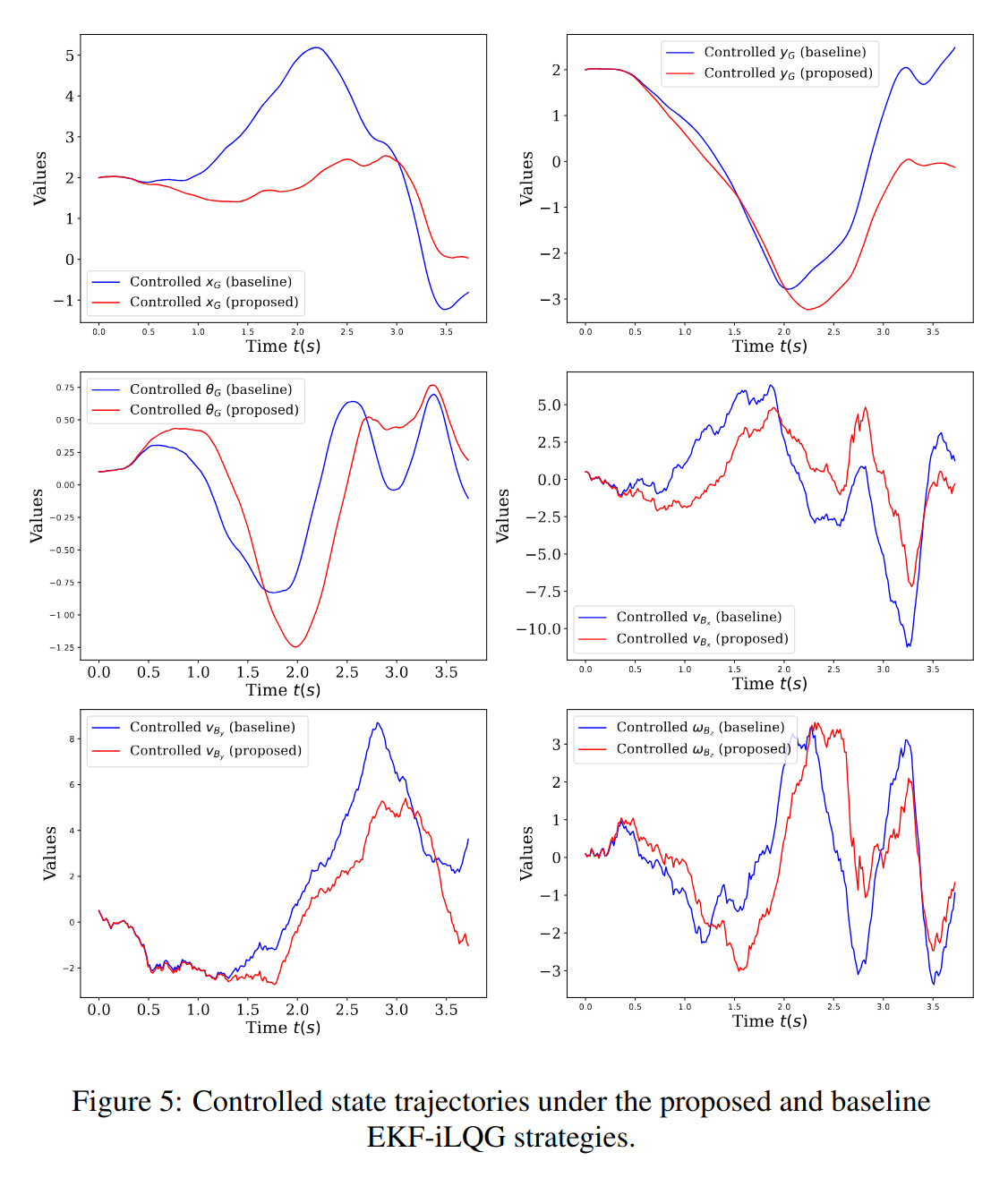
Results: Comparison with EKF + iLQG
We validated our method against a standard baseline: the Extended Kalman Filter (EKF) combined with Iterative Linear Quadratic Gaussian (iLQG) control.
Performance Analysis: As shown in the trajectory plots and the performance table below, our method significantly outperforms the EKF-iLQG baseline in terms of cost accumulation and robustness to noise.