Convex Optimal Control using Koopman Operator
Convex Optimal Control for Nonlinear Systems
This research addresses the challenging infinite-time horizon optimal control problem for nonlinear systems, particularly when incorporating safety constraints. We achieve tractability by leveraging the Koopman operator theory and solving the problem in its dual form.
The Koopman operator provides a methodology to “lift” the nonlinear system dynamics into an infinite-dimensional, yet linear, space. By applying this transformation, the original non-convex optimal control problem is recast as a convex optimization problem.
Methodology:
- Convex Relaxation: We utilize the dual form of the control problem, which, when expressed in the Koopman space, admits a convex relaxation.
- Sum-of-Squares (SOS) Optimization: The optimal control policy and invariant safety set are found using Sum-of-Squares (SOS) techniques. This transformation is exact when the safety constraints are defined by polynomial functions.
- Tractability: The final formulation is a convex program, allowing for efficient and guaranteed optimal solutions using standard Semi-Definite Programming (SDP) solvers.
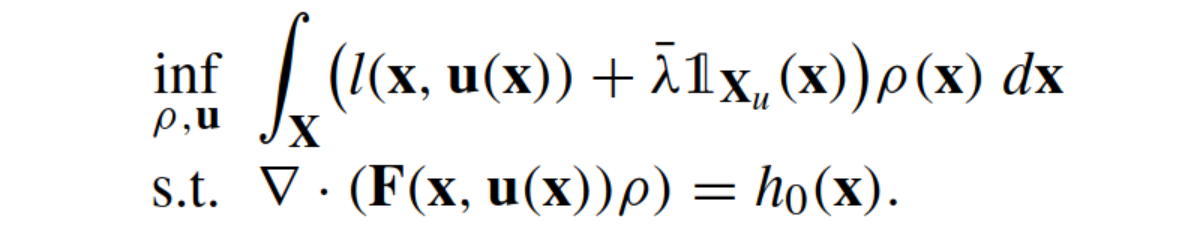
Formulation
The problem minimizes an objective over an infinite horizon subject to system dynamics and safety constraints $\mathcal{C}$.
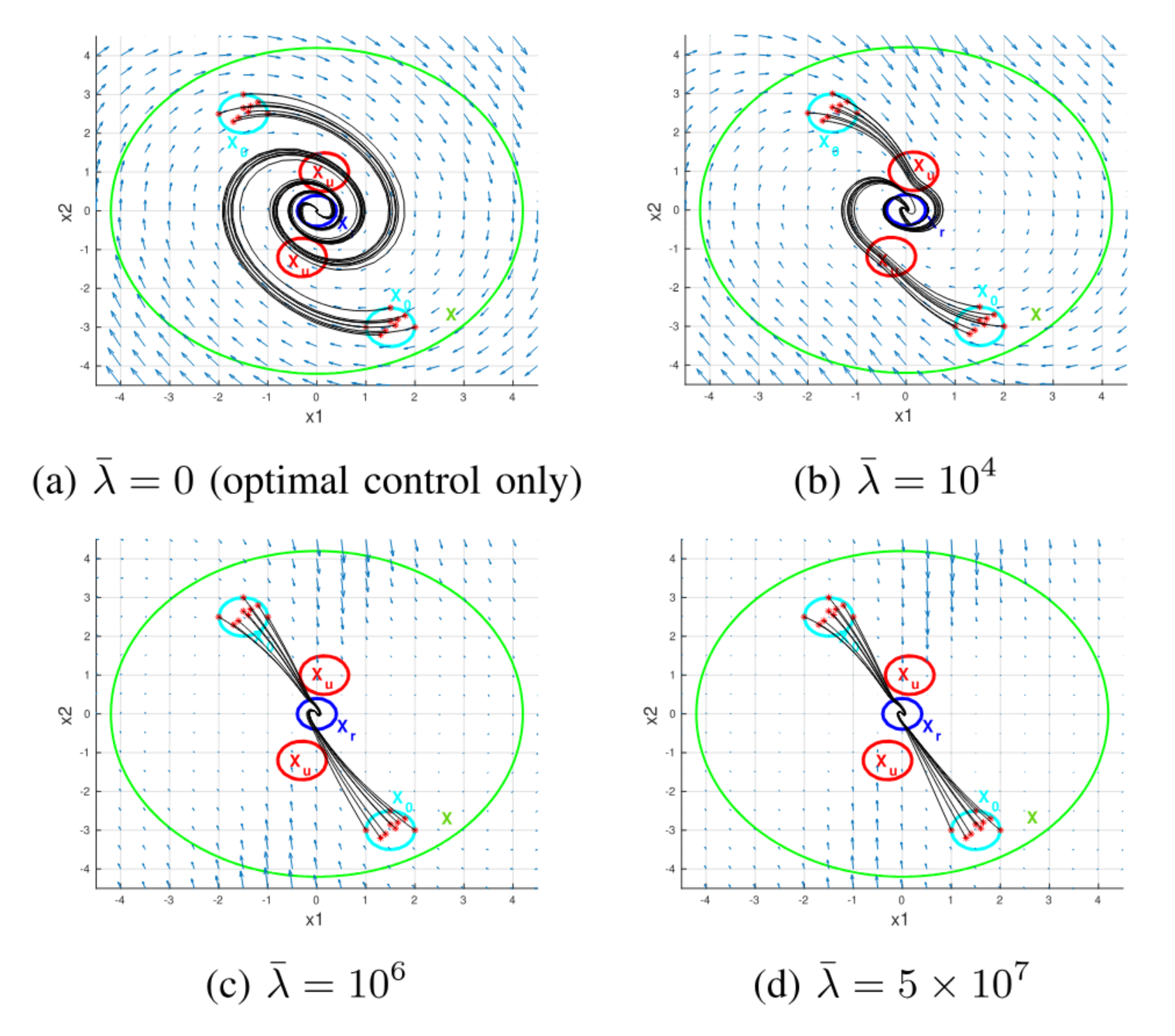
Results
The solution demonstrates robust convergence to the optimal, safe control policy while maintaining the system state within the constrained region (represented by the feasible set).