Environment Representation in Sim-to-Real Imitation Learning
Bridging the Sim-to-Real Gap via Semantic Representations
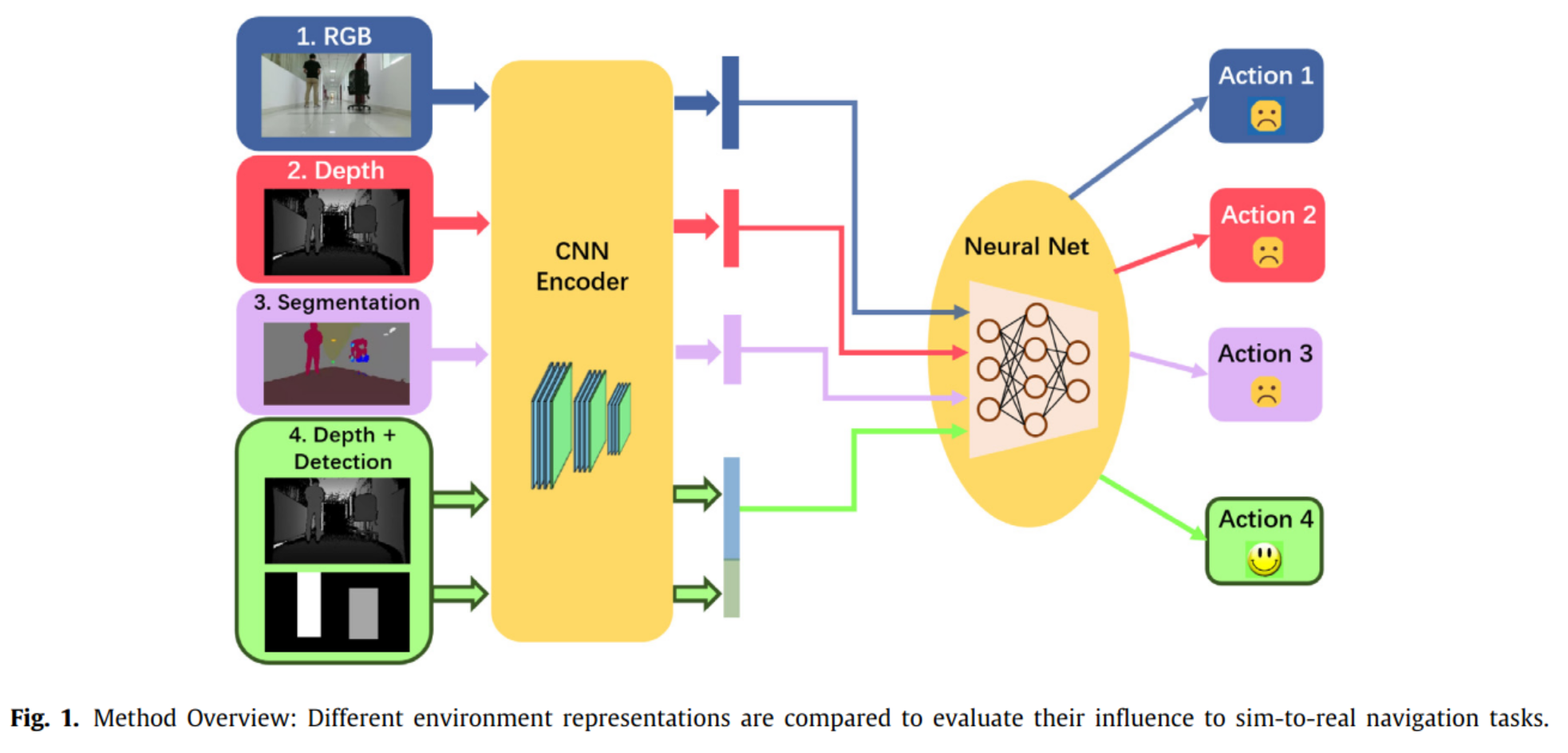
This project investigates how different environmental representations affect the transfer of navigation policies from simulation to the real world (Sim-to-Real).
We employed an imitation learning framework to train a collision-avoidance policy using synthetic sensor data. The core study focused on evaluating various sensor fusion strategies before feeding the data into the neural control policy.
Key Findings: Real-world experiments revealed that categorical and semantic information (e.g., semantic segmentation) is far more critical for robust navigation than low-level visual features like color or texture. This suggests that abstracting the environment is key to successful sim-to-real transfer.
Methodology & Network Architecture